 Reading Time: 3 minutes
Reading Time: 3 minutes
Einleitung und Zielsetzung
Die invasive Ausbreitung der Asiatischen Hornisse (Vespa velutina) stellt eine massive Bedrohung für heimische Bienenvölker und die Biodiversität dar. Herkömmliche Lockstofffallen weisen jedoch ein gravierendes Problem auf: Sie sind unselektiv. Dies führt oft zu erheblichen Beifangraten geschützter Arten, wie der Europäischen Hornisse (Vespa crabro), was den ökologischen Nutzen der Fallen konterkariert.
Dieses Projekt verfolgt das Ziel, eine intelligente, selektive Falle zu entwickeln, die Technik und Artenschutz vereint. Die Leitplanken der Entwicklung sind:
- Kosteneffizienz: Einsatz von erschwinglichen Standard-Komponenten (Himax WiseEye, ESP32, Standard-Servos).
- Einfachheit & Nachbaubarkeit: Das Design ist für Maker und Imker ohne Speziallabor realisierbar.
- 3D-Druck-Optimierung: Alle mechanischen Komponenten sind für den heimischen FDM-Druck ausgelegt.
- Energieeffizienz: Optimiert für den monatelangen, autarken Batterie- oder Solarbetrieb im Feld.
1. Systemarchitektur: Dezentrale Inferenz (Edge AI)
Um die geforderte Energieeffizienz zu erreichen, basiert das System auf einer zweistufigen Controller-Kaskade:
- Primärsensorik (Himax WiseEye): Ein dedizierter Vision-AI-Chip fungiert als Low-Power-Bildverarbeitungseinheit. Die Objekterkennungs-Modelle (CNN) wurden bereits im Vorjahr spezifisch für diesen Chipsatz trainiert und validiert. Sie kommen aktuell bereits in der HornetLog App zur Spezies-Identifikation zum Einsatz, was die Praxistauglichkeit der algorithmischen Trennung belegt.
- System-Logik (ESP32): Der Hauptcontroller verbleibt im Deep-Sleep-Modus und wird nur bei einer positiven Detektion durch den KI-Chip geweckt. Er steuert die Aktuatorik und das Kommunikationsmodul.
- Telemetrie (LoRaWAN): Über ein SX1276-Modul werden Fangereignisse und Akkuspannung per LoRa-Protokoll übertragen, um eine weitreichende Vernetzung bei minimalem Stromverbrauch zu ermöglichen.

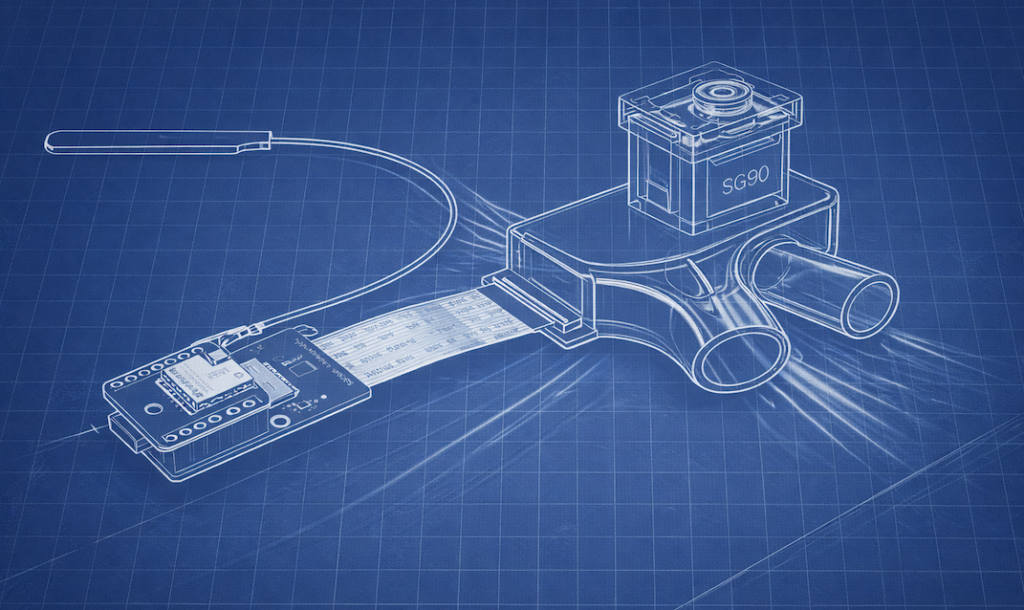
2. Mechanische Selektion: Die federbelastete Y-Weiche mit Fail-Safe (Variante 1)
Das mechanische Kernstück ist eine aktive Y-Weiche. Diese Konstruktion wurde gewählt, da sie im Vergleich zu komplexeren Systemen deutlich einfacher zu drucken und unempfindlicher gegenüber Verschmutzung (Lockstoffreste, Insektenrückstände) ist.
Konstruktionsmerkmale der Weiche
Die Weiche besteht aus einem Y-Verteilergehäuse mit einer zentral gelagerten Klappe. Ein entscheidendes Sicherheitsmerkmal ist die Integration einer Torsionsfeder am Drehpunkt:
- Neutralstellung (Default-Safe): In der stromlosen Ruheposition drückt die Feder die Klappe gegen einen mechanischen Endanschlag. Der Pfad zum Fangbehälter ist physisch gesperrt; der Fluchtweg ins Freie ist fluchtend geöffnet. Dies garantiert, dass bei Systemfehlern oder leerem Akku kein Tier versehentlich gefangen wird.
- Aktivierung (Target-Match): Nur bei verifizierter Detektion von Vespa velutina wirkt der Servo gegen die Federkraft und öffnet den Pfad in den Fangbehälter.
Dokumentierte Alternativkonzepte
Im Rahmen der Konzeptphase wurden auch folgende Mechanismen evaluiert:
- Variante 2 (Falltür-Prinzip): Ein horizontaler Schieber öffnet den Boden der Klassifizierungszone. (Erhöhtes Einklemmrisiko).
- Variante 3 (Linear-Kolben-Selektor): Ein axial verschiebbarer Kolben mit internen Kanälen schaltet zwischen zwei Ausgängen um. (Hohe Anforderungen an Fertigungstoleranzen und anfällig für Verkleben).
3. Sicherheits-Algorithmen (Pinch Protection)
Der Schutz der Insekten während des Schaltvorgangs wird durch eine multidimensionale Logik sichergestellt:
- Optische Überwachung: IR-Lichtschranken im Bereich der Klappe fungieren als Hardlock. Ein Schaltvorgang wird unterdrückt, solange der Lichtweg unterbrochen ist.
- Software-Hysterese: Um Fehltriggerungen zu vermeiden, muss die KI-Konfidenz über ein definiertes Zeitfenster stabil über 85% liegen.
- Stall-Detection (Optional): Eine Überwachung der Stromaufnahme des Aktuators erkennt mechanische Widerstände sofort und initiiert einen Rücklauf in die Neutralstellung, um das Tierwohl zu schützen.
4. Hardware-Grundlagen und Weiterentwicklung
Das hier vorgestellte Konzept nutzte funktionale Prinzipien bestehender Open-Source-Lösungen (wie das Trichter-Prinzip des Adamow-Designs von 2023) als technischen Ausgangspunkt.
Es wird jedoch ausdrücklich festgehalten, dass es sich bei dem hier dokumentierten Entwurf um eine eigenständige Gehäuse- und Mechanikentwicklung handelt. Der aktuelle Prototyp integriert die Elektronik und die spezifische Weichen-Mechanik in eine kompakte, funktionale Einheit.
Fazit und Ausblick
Dieses Projekt befindet sich aktuell in der aktiven Prototypen-Phase. Die Kombination aus lokal arbeitender Vision-AI, der federbelasteten Fail-Safe-Mechanik und den integrierten Sicherheits-Algorithmen bietet einen vielversprechenden Weg für den intelligenten Artenschutz.
Mit dieser Dokumentation möchte ich meine bisherigen Ergebnisse und die evaluierten mechanischen Ansätze mit der Community teilen. Mein Ziel ist es, eine offene Wissensbasis zu schaffen, die als Grundlage für weitere Entwicklungen dienen kann und sicherstellt, dass diese Technologie für alle frei zugänglich bleibt.